
Hello again! My name is Christopher Pohorecki and this is a recap of my fifth week at my OSU Aerospace Engineering internship located in Stillwater Oklahoma! As you may know from my previous posts, our group has been tasked with creating a bi-copter capable of VTOL flight and horizontal flight. Our concept will then be tested against a replica of NASA’s ingenuity, these tests include how large of an area each drone is capable of mapping out.
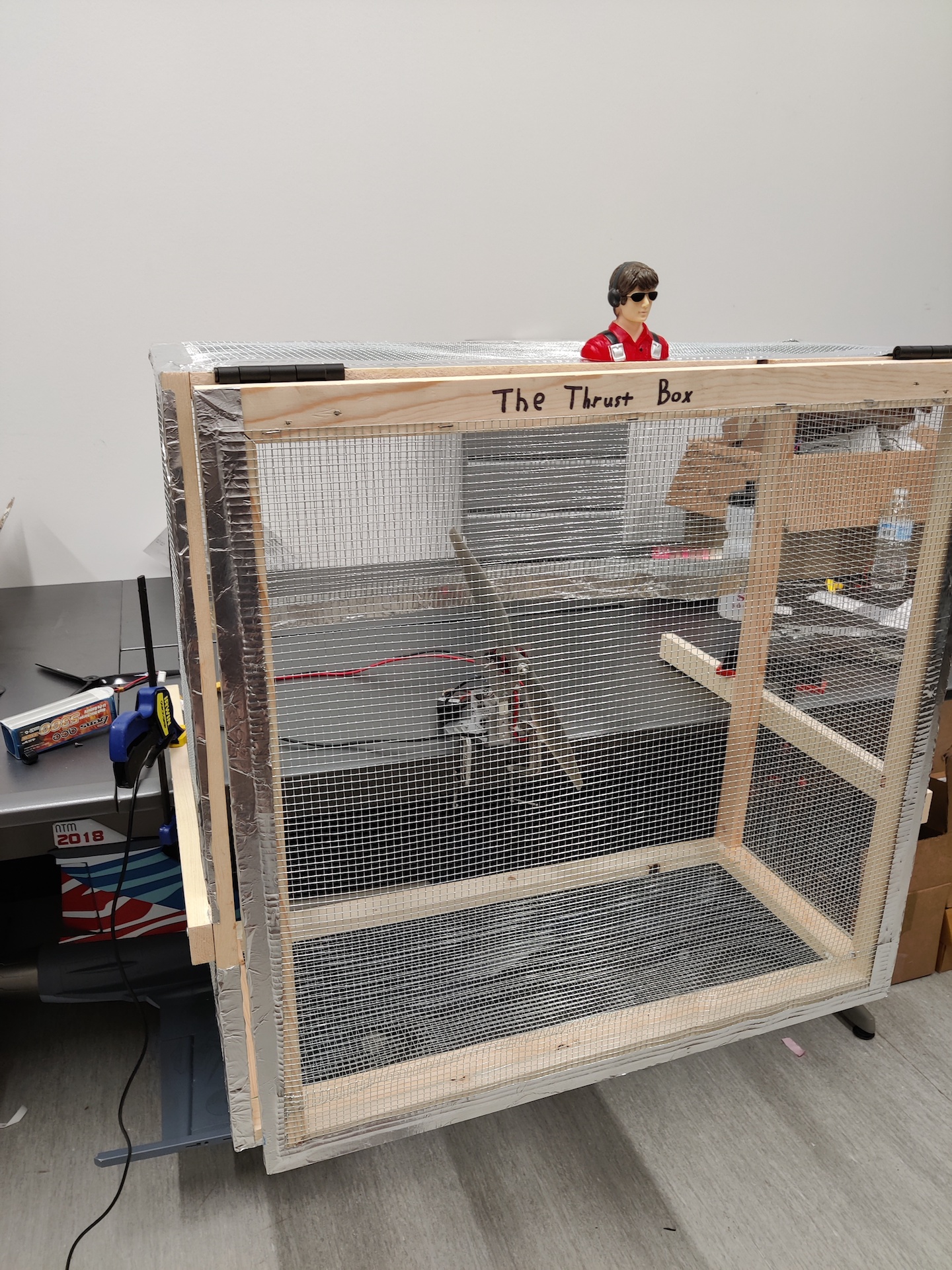
Photo of our motor test!
To start the week off we got to begin our motor testing! First, we had to figure out how to use the software that measures all of our data, called RCbenchmark. After going through our software and running a few test runs without props we were ready for the real deal. We cleared off a table and clamped down our safety box, and plugged in a 14.8-volt battery that the lab already had. We then attached variations of different props to our first motor the T-Motor. As we fired up the motor we realized how dangerous running a prop would be without the box that we constructed. After running the test all our data was automatically compiled into an excel spreadsheet. We then ran the same test on our second motor called the Leopard motor. After compiling all the data we graphed each motor and compared them. The Leopard motor produced much more thrust at a slightly higher amperage rate, while the T-Motor was bottlenecked because we used a 14.8-volt battery, instead of the recommended 24-volt battery. We then decided to go with the Leopard motor paired with a 15×6 prop as it was more than capable to lift our bi-copter, and was more compatible with our thrust vectoring system.
I then compiled a parts list of all the necessary electronics needed to make our bi-copter ready to fly. This included two ESC’s capable of our 50 AMP pull from our motors, a Futaba receiver capable of pairing with our controllers, two servos, another Leopard motor, and another 15×6 prop. One thing missing from this list is a flight controller, I came to realize that there is a shortage of flight controllers necessary for a bi-copter. Our new is plan is to take a flight controller off an existing plane in the lab and put it on our own bi-copter.

Laser-cut landing gear.
As we waited for our parts to arrive we began assembling our thrust vectoring system and noting any issues before printing the other side of the wing. We then began designing landing gear for our wing, we decided to use foam board to save weight, we then laser cut some foam board in the shape of our airfoil so the landing gear could be sandwiched in between the thrust vectoring system and the wing to increase the points of contact. As seen in the picture to the right. All of our parts will probably arrive on Tuesday of next week, meaning we will be ready for assembly!
I have enjoyed hanging out with my roommate and having cookouts at our house. I look forward to spending the Fourth of July with them! I am super happy with the great progress we have made with our project, and look forward to my final week next week! Thank you to those who read my blog!
There are no comments published yet.